|
溝口晃・深堀孔明 ユーザが指さした位置にロボットが移動します。Kinectで人間の骨格データを取得し、ARマーカでフィールドとロボットの座標を取得しています。 ビデオではロボットを操作してフィールド外に物品を押し出すゲームをしています。 [動画を見る] |
 |
|
松澤直熙 SmartomocoはLocomoを用いて組み上げた二輪ロボットをアンドロイド端末の傾きセンサーによって動かします。 また、二輪ロボットに載せたカメラからの映像をアンドロイド端末に表示させます。 [動画を見る] |

|
|
上田和輝 人間の顔を撮影していると邪魔しにくるロボットを作った。 (実際はスマートフォンの画面に映っているものに応じてLocomoの挙動を変えているだけであるので、 被写体の種類の違いを使ったコントローラーを作ったと言った方が正しい。) [動画を見る] |

|
|
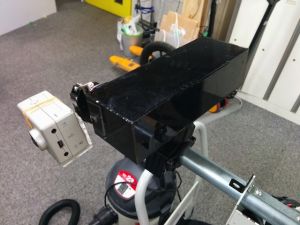
新田慧 バイクのカーブ時の傾きを加速度センサによって自動補正してくれる車載動画撮影用カメラマウント。 [動画を見る] |
|
|
樋口啓太 あっちむいてホイに負けないロボットを製作した。 本課題では、じゃんけんの後のあっちむいてホイに着目し、人間の指方向を認識して、その方向以外に顔を向けるロボットを開発した。 指方向認識として、3点近接センサを用いて3方向に向いた指を認識する手法を開発した。 [動画を見る] |

|
|
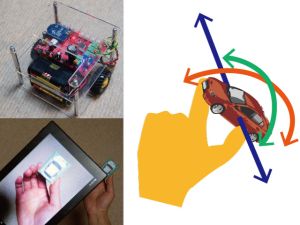
野口翔平 Androidタブレットと小さな箱を用いて、箱の動きに追従するようにロボットカーを制御する直観的なラジコンの操縦方法。 [動画を見る] |
|
|
崔セミ 実世界の物体の色を認識して、その色が絵の具で使えるようにすることが目標です。 詳しい動きは動画を見てください。(実際に具現できなかったところは、イメージとして、動きを表しました) [動画を見る] |

|